隨著翻堆機發展走向智能化,有的機型還配備了電子監控模塊,它是用來控制其他模塊的運動,來相互協調完成整個肥料的翻堆過程。當完成了料堆翻堆工作或者翻堆過程中遇到了障礙物時,可以利用提升液壓油缸來將整個的翻堆裝置提升到一定的位置,這樣可以有效的避開障礙物,避免了剛性沖擊同時減少了對翻堆裝置的破壞,便于翻堆裝置實現快退或快進回到指定的作業位置。當肥料堆放不整齊時可以通過清理鏟,將肥料堆周邊的肥料或者障礙物清除掉,從而保證了液壓履帶在運行過程中平穩性,避免了由于路面不整齊而造成運動時的不平穩。
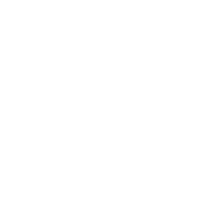
自走式有機肥翻堆機的整體結構:
1.整機車架總成模塊:它是翻拋機整機所有設備的載體,依靠堅固的鋼質車架體,為整機的行走、作業等提供了可靠的載體保障。
2.駕駛室操控及發動機模塊:發動機是整個翻拋機設備的動力來源,為整機的行走,作業及液壓驅動提供動力,安裝于整機的上方駕駛室旁邊位置。駕駛室是全通透可視的,可以更方便觀察到翻拋作業的效果,其內部安裝有整機作業行走的操控設備,主要是用來操控整機的工作運轉及行走,同時避免翻堆作業中濺起的粉塵對操作人員的傷害。
3.翻拋裝置模塊:翻拋裝置由兩側的搖臂板懸置于整機機架下。在翻轉過程中,刀片對原料不斷地粉碎,使得大塊物料成為粉末與氧氣混合。翻拋裝置后端裝有防護后蓋,它的作用是用來遮擋翻拋后飛濺的物料,防止其飛濺的過高造成翻拋作業后料堆不整齊,并有效減少了發酵后期料堆水分降低引起的塵埃飛揚,能方便翻拋操作者觀控翻拋堆的效果。
4.噴灑裝置模塊:主要是將生物的菌種與水均勻地噴撒在秸稈上,使得秸稈腐熟轉化為肥料,秸稈還田實現再利用,該生化技術非常的**,是將秸稈進行腐熟的**技術。
5.履帶行走模塊:是整個翻拋機的行走的執行部件,采用履帶作為移動裝置主要是為了減少整機對地面的壓力,避免翻堆機的前行而導致的土質地面的疏松,并且履帶工作平穩,可以減少機身的振動。
6.工作裝置升降模塊:其主要功能是調節翻拋裝置的工作高度,帶動翻拋裝置與噴灑裝置實現對不同高度的肥料進行翻拋作業,從而實現對所有原料的處理加工。
7.電子監控模塊:主要是實現對其他模塊動作的靜止與監視從而保證各個模塊協調運轉。

 156-3820-6333
156-3820-6333